宇树科技新专利可提高机器人复杂环境作业能力观点
观察君  2025-08-19 11:14
2025-08-19 11:14
导读
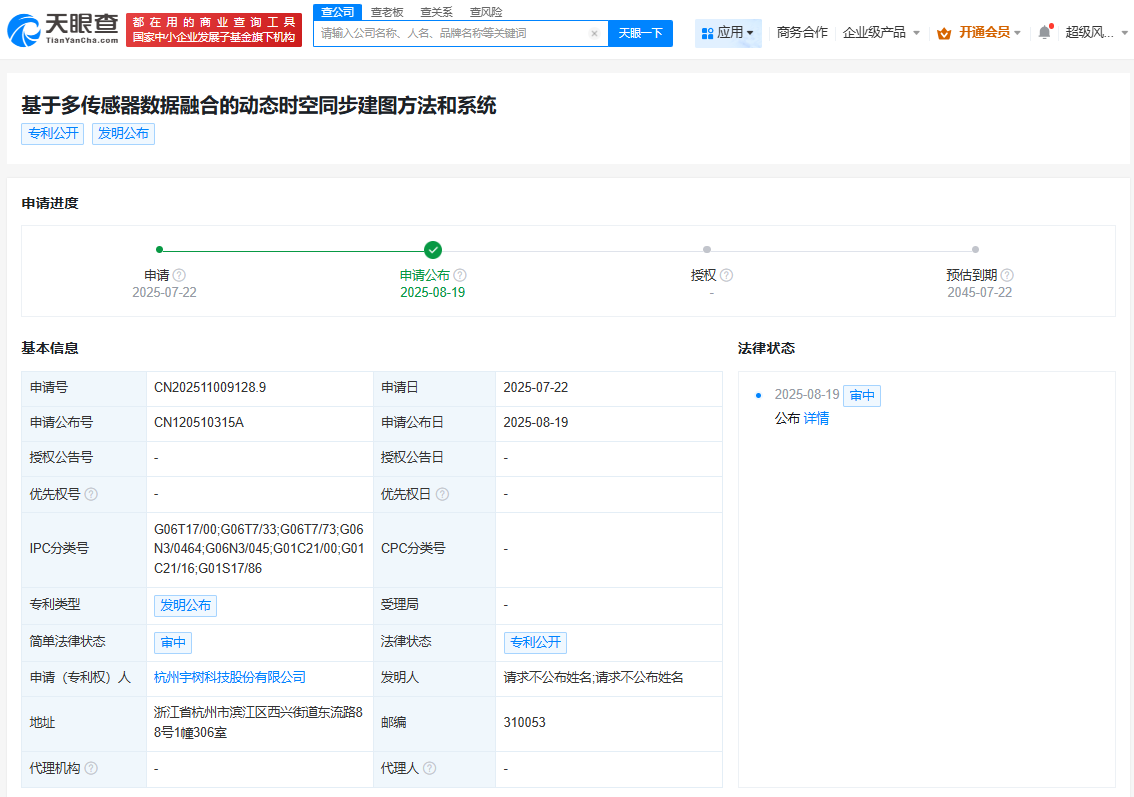
天眼查App显示,8月19日,杭州宇树科技股份有限公司申请的“基于多传感器数据融合的动态时空同步建图方法和系统”专利公布。
天眼查App显示,8月19日,杭州宇树科技股份有限公司申请的“基于多传感器数据融合的动态时空同步建图方法和系统”专利公布。
摘要显示,本发明属于环境感知技术领域。现有基于多传感器数据的建图方案,没有考虑传感器数据之间存在时空偏差,导致传感器数据在进行融合时,会存在时空同步性不足的问题,影响了地图构建的精度。本发明的基于多传感器数据融合的动态时空同步建图方法,通过构建点云畸变校正模块、传感器时间对齐模块、动态目标感知模块、多地图融合模块,从而可以有效解决多传感器数据融合时的时空同步性不足的问题,显著提升点云与图像的空间配准精度,有效提高动态场景的地图构建效果,使得机器人能够对动态目标进行准确识别以及跟踪,提高机器人在复杂环境中的自主作业能力。

宇树科技
1.TMT观察网遵循行业规范,任何转载的稿件都会明确标注作者和来源;
2.TMT观察网的原创文章,请转载时务必注明文章作者和"来源:TMT观察网",不尊重原创的行为TMT观察网或将追究责任;
3.作者投稿可能会经TMT观察网编辑修改或补充。
