百车停摆堵死武汉高架!萝卜快跑的 “零故障” 神话,被现实狠狠打脸观点
萝卜快跑若想挽回信任,必须停下扩张的脚步,补上安全兜底的短板。

萝卜快跑若想挽回信任,必须停下扩张的脚步,补上安全兜底的短板。
文丨南博图
编辑丨新知君
2026年刚开年,智能驾驶行业迎来政策与现实的剧烈碰撞。
3月,《武汉市智能网联汽车发展促进条例》正式实施,作为全国副省级城市首部专项法规,它不仅开放了3892公里测试道路,更推动600台无人驾驶车辆常态化运行,为行业按下“加速键”。
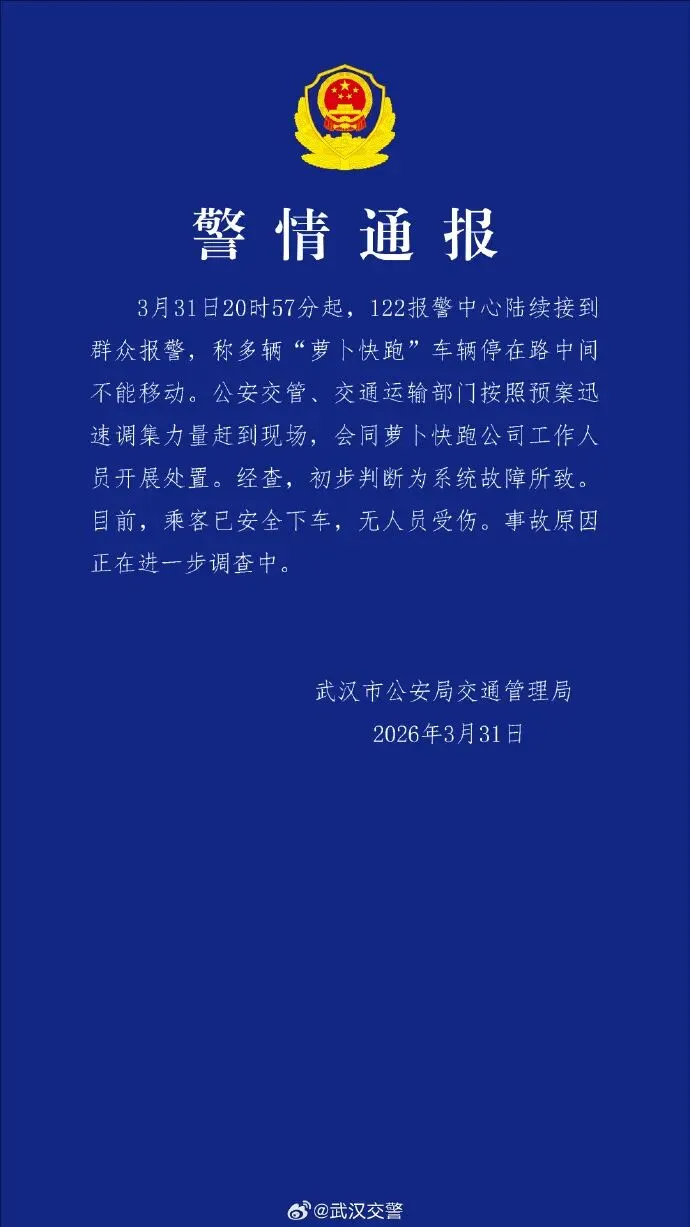
可就在政策红利释放的节点,3月31日晚武汉突发惊魂一幕,近百辆百度萝卜快跑无人驾驶车在高架、主干道集体停摆,部分车辆横堵快车道,导致交通几近瘫痪,乘客被困高架近两小时,最终靠交警徒步引导才安全撤离。
这场近乎城市级的交通中断,狠狠戳破了萝卜快跑长期宣传的“零事故、零人工干预”神话。
作为百度旗下自动驾驶出行平台,它已在全球26个城市完成超2000万次出行服务,2025年四季度订单量达340万单,甚至宣称在武汉实现单车收支平衡。
但百车同步停摆的系统故障,却暴露了高阶自动驾驶的致命软肋。
一边是政策层面的全力护航,一边是商业化运营的安全失守;一边是全球扩张的激进步伐,一边是应急机制的全面缺位。
萝卜快跑号称的“零故障”的神话瞬间破灭,智能驾驶行业“野蛮生长”的隐患也随之浮出水面。
停摆真相:不是偶然 bug,是系统性溃败
武汉百车停摆绝非偶然,而是萝卜快跑技术架构缺陷、运营体系滞后的集中爆发。
这场被交警通报为“系统故障”的事件,背后是从技术设计到服务兜底的全方位失守,暴露的是企业对安全的漠视。
技术层面,集中式架构的脆弱性在此次事件中暴露无遗。行业共识是,L4 级自动驾驶必须具备“失效安全”能力——主系统崩溃时,本地备用模块应立即接管,执行减速、靠边等最小风险策略。
但萝卜快跑的车辆却直接“脑死亡”,横停在行车道中央,说明其高度依赖云端指令或中心化调度,缺乏独立运行的本地应急逻辑。
有业内人士分析,此次停摆大概率源于软件推送、网络分区或控制中心指令错误,一个节点出错就引发全网瘫痪,这种架构设计在规模化部署中形同“定时炸弹”。
更讽刺的是,这并非首次故障,2024年7月萝卜快跑就曾在晚高峰“趴窝”,当时未引起足够重视,最终导致更严重的后果。
运营层面的失职更让用户寒心。故障发生后,车内SOS紧急呼叫系统失灵,客服电话要么占线,要么接通后机械重复“网络异常”,没有任何实质性解决方案。
有乘客被困高架近两小时,既无法下车又联系不上救援,只能眼睁睁看着后方车辆拥堵成河。
更离谱的是,平台不仅未及时启动救援机制,甚至照常收取车费,对受影响用户也未提及赔偿事宜。
按照行业标准,萝卜快跑订单量已达百万级,早已超出“测试”范畴,本应配套专属救援队、7×24小时应急响应中心和交管联动机制,但现实是企业将安全风险完全转嫁给社会,靠公共警力兜底。
有科技博主犀利点评,“萝卜快跑的‘零故障’宣传,就像皇帝的新衣。真正的自动驾驶,不仅要能跑起来,更要在失控时能安全停下来。百车停摆堵死的不只是道路,还有用户对智能驾驶的信任。”

战略悖论:扩张狂奔与根基薄弱的致命失衡
萝卜快跑的困境,本质是战略扩张与基础能力的严重失衡。
它一边在全球市场激进跑马圈地,一边却忽视了技术稳定性与运营服务的打磨,这种 “重规模轻安全” 的发展模式,注定难以持续。
萝卜快跑的战略优势曾十分突出。作为国内自动驾驶的先行者,它累计自动驾驶里程超3亿公里,全无人驾驶里程超1.9亿公里,在武汉等城市的复杂交通场景中积累了大量数据。
技术路线上,它采用“聪明的车+智慧的路”的车路协同模式,借助路侧传感器的“上帝视角”降低单车感知压力,配合成本仅20.46万的定制车型RT6,理论上具备更强的商业化潜力。
全球布局更是迅猛,不仅在迪拜启动全无人驾驶商业化运营,还与瑞士邮政巴士合作,计划进军伦敦市场,2026年更被评为“最具创新力企业”汽车类全球第二。
政策层面,武汉等城市的法规支持、数据要素流通平台搭建,也为其提供了肥沃的发展土壤武汉市经济和信息化局。
但这些优势,都被激进扩张掩盖的短板所抵消。首先是技术路线的依赖性风险,车路协同模式虽降低了单车成本,却极度依赖基建配套,一旦脱离国内完善的路侧设施,在迪拜等海外市场就需转向单车智能,导致技术体系频繁切换。
其次是商业化与安全责任的脱节,萝卜快跑急于通过规模化运营证明盈利模型,却未建立匹配的责任体系——事故责任划分、保险理赔、违法认定等核心问题仍无明确答案,此次车辆被追尾的理赔纠纷,就暴露了合规漏洞。
更严重的是研发投入的结构性失衡,为了追求扩张速度,可能将资源集中在用户可见的功能迭代上,而应急机制、系统稳定性等“隐性能力”被忽视。
对比国际同行Waymo,两者虽同为L4级自动驾驶信徒,但打法截然不同。
Waymo坚持“单车智能”路线,要求车辆具备100% 独立解决问题的能力,虽成本更高,但系统稳定性更优;而萝卜快跑追求快速扩张,却在安全兜底上偷工减料。
有行业分析师指出,“智能驾驶行业已进入淘汰赛,企业必须同时回答好成本、合规、量产能力三个问题。萝卜快跑只解决了成本和规模,却在最核心的安全合规上掉了链子。”
资本市场的态度也反映了隐忧。智能驾驶赛道投资额从2021年的300亿元峰值持续走低,2025年不足120亿元,资金向头部企业集中的同时,对技术稳定性的要求也愈发严苛。
萝卜快跑的母公司百度,虽靠补贴维持了订单增长,但此次停摆事件可能影响其估值逻辑,毕竟没有投资者愿意为 “裸奔式扩张” 买单。

政策红利下的行业拷问:谁来为交通安全买单?
武汉为智能驾驶提供了全国领先的政策支持,却未换来企业对安全的敬畏。这场停摆事件不仅是对萝卜快跑的考验,更是对整个行业的警示:政策包容不是纵容,技术创新不能以牺牲公共安全为代价。
武汉的政策红利堪称“顶配”。除了专项法规,当地还搭建了全市统一的智能网联汽车服务平台,推动跨部门数据共享,甚至完成了国内首例智能网联汽车测试道路安全风险数据交易武汉市经济和信息化局。
3892公里的开放道路、600台的常态化运行规模,为企业提供了近乎理想的试验场武汉市经济和信息化局。这种“制度先行、试点破冰”的模式,本是为了推动行业高质量发展,但萝卜快跑却将政策包容当成了“免责金牌”,在没有完善安全兜底的情况下大规模投放车辆。
更值得警惕的是行业普遍存在的“成本转嫁”逻辑。智能驾驶企业享受着无人化带来的低人力成本红利,却将应急救援、交通疏导等社会责任甩给政府和公众。
此次事件中,交警不仅要疏导交通,还要徒步上高架逐车引导乘客撤离,相当于用公共资源为企业的技术缺陷买单。
而现行法规对“AI 司机”的责任界定仍属空白,一旦发生人身伤亡事故,责任链条将陷入无解的困境。
中国汽车工业协会常务副会长付炳锋强调,企业应以L3级产品落地为契机,积极承担主体责任,严守安全底线。
这意味着企业不仅要优化技术,更要建立健全应急响应机制、明确责任划分、完善保险体系。武汉的政策也应随之升级,不能只重激励不重监管,可借鉴深圳、合肥经验,在准入、评估、验收等环节设置更严格的安全标准,将应急能力、责任体系建设纳入考核武汉市经济和信息化局。
行业分析师直言,“商业化验证是智驾企业的核心门槛。萝卜快跑的停摆证明,没有安全兜底的规模化毫无意义。行业需要的不是跑得多快、覆盖多广,而是跑得有多稳、有多安全。”

智能驾驶的底色,永远是安全而非速度
萝卜快跑武汉百车停摆事件,给狂奔的智能驾驶行业踩下了急刹车。它戳破了“零故障”的宣传神话,暴露了技术架构、运营服务、责任体系的多重短板,更引发了对行业发展模式的深刻反思。
智能驾驶的终极目标是提升交通效率与安全,但如果以牺牲当下的公共安全为代价,这样的 “创新”毫无意义。萝卜快跑拥有先发优势、政策红利、成本控制能力等多重利好,却因“重规模轻安全”的战略失衡,让优势化为乌有。
它的教训警示所有企业,技术可以跑得快,但部署必须走得稳;扩张可以激进,但安全底线绝不能突破。
对于行业而言,政策支持应与监管约束同步推进,既要为技术创新提供空间,也要通过法规明确企业的安全责任,避免公共道路沦为 “低成本试验场”。
对于消费者而言,此次事件是一次理性的降温,让大家看清智能驾驶仍处于发展阶段,安全风险尚未完全可控。
智能驾驶的赛道很长,不是百米冲刺而是马拉松。萝卜快跑若想挽回信任,必须停下扩张的脚步,补上安全兜底的短板,优化系统架构、建立专属应急团队、明确责任理赔机制。
否则,再激进的全球布局、再亮眼的订单数据,都将如同沙滩上的城堡,经不起安全事故的冲击。
真正的智能驾驶,不该是让用户在高架上被困两小时的惊魂体验,而应是即便系统故障,也能安全靠边、快速救援的安心保障。
当技术创新回归安全本质,行业才能真正走向成熟,否则所有“未来已来”的口号,都只是建立在流沙上的幻觉。
1.TMT观察网遵循行业规范,任何转载的稿件都会明确标注作者和来源;
2.TMT观察网的原创文章,请转载时务必注明文章作者和"来源:TMT观察网",不尊重原创的行为TMT观察网或将追究责任;
3.作者投稿可能会经TMT观察网编辑修改或补充。
