我国自主研发突破性"双模态"激光雷达问世:兼顾速度与精度的三维感知系统快讯
系统能够实现在高精度扫描模式与快速闪光成像模式之间的灵活切换,这一技术突破有望显著提升自动驾驶汽车、机器人、无人机等智能设备的三维环境感知能力,团队已成功研制出基于该技术的激光雷达原型系统。
【TechWeb】近日,华中科技大学研究团队成功研发出一种创新的"双模态"激光雷达系统,这一技术突破有望显著提升自动驾驶汽车、机器人、无人机等智能设备的三维环境感知能力,解决行业长期存在的速度与精度难以兼顾的难题。
作为智能设备的"眼睛",激光雷达的性能直接关系到感知的精确性与响应速度。当前主流激光雷达主要分为扫描式与闪光式两类:前者精度高但扫描速度较慢,后者速度快却牺牲了部分精度。在这一背景下,华中科技大学团队提出的"双模态"激光雷达新架构,首次从硬件层面成功融合了两种技术的优势。
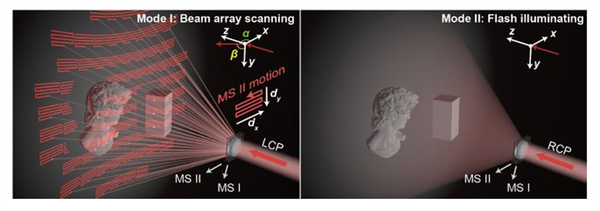
该系统的核心创新在于采用了一种被称为"混合级联平动超表面"的光学器件,由两层特殊设计的纳米镜片构成。通过调节入射激光的偏振状态,系统能够实现在高精度扫描模式与快速闪光成像模式之间的灵活切换。在扫描模式下,系统可对远距离目标进行精细探测;切换至闪光模式后,则能一次性均匀覆盖整个视场,实现快速三维成像。
这种硬件层面的双模态设计使雷达能够根据实际场景自主选择最优感知策略:先以闪光模式快速获取全局环境信息,再针对关键区域自动切换为扫描模式进行细节捕捉。该器件的两层超表面可通过微动执行机构实现精确的相对平移,整体结构紧凑、易于集成,特别适合对体积和重量敏感的应用场合。
目前,团队已成功研制出基于该技术的激光雷达原型系统,实现了"既快又准"的三维感知能力。这一突破性成果不仅填补了行业空白,更为智能设备感知复杂环境提供了全新解决方案,未来将在自动驾驶、机器人导航、无人机测绘等领域发挥重要作用。(Suky)
1.TMT观察网遵循行业规范,任何转载的稿件都会明确标注作者和来源;
2.TMT观察网的原创文章,请转载时务必注明文章作者和"来源:TMT观察网",不尊重原创的行为TMT观察网或将追究责任;
3.作者投稿可能会经TMT观察网编辑修改或补充。
